





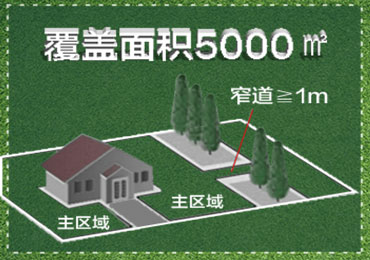
通过RTK建立虚拟围线能让机器人在范围内精准定位,在无外力干扰的情况下将误差值保持在10公分以下,最大覆盖面积达到5000㎡。规划剪草路线,实施断点续剪;避免重复剪草,减少草坪损害;避免出现死角,提高剪草效率。
功能介绍
01
one
RTK技术 断点续剪

02
two
智能剪草 配套APP
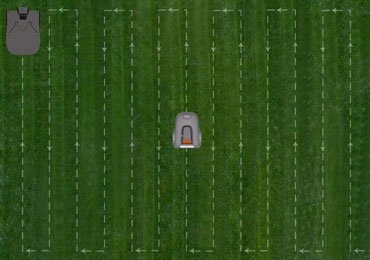
APP规划路线、远端操控、设定修剪计划,通过ISWARDAPP可设置剪草计划、剪草高度、剪草区域,ISWARD会按照规划路线进行“弓”字型行动,有规划的进行巡回剪草,相比围线机器人的随机剪草来的高效。

03
three
视觉识别 安全无忧
使用深度摄像头辅助进行定位,提高了机器人识别边界的准确性,可以有效规避道路上的障碍物并协助机器人回到充电桩。此摄像头能够精准探测到前方3米范围内的物体,与RTK定位数据和惯性导航数据进行融合计算,以此制定安全高效的工作路径。
04
four
养护优化 人机协同
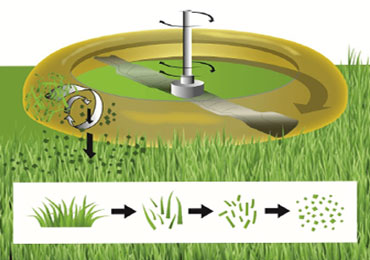
机器人采用mulching式剪草,有效的控制草的长度,被剪掉的碎草会掉落到土壤上成为草坪的养分及水分。这种剪草方式能够养护草坪,延长草坪寿命,节约肥料及水的用量。

05
five
无线定位 智能剪草
三合一的技术来提升定位精准度,根据讯号强弱判断,辅助机器准确定位;自动选择可靠卫星;自主回家以及充电;准确定位防止遗失。
06
six
日剪草面积可达3000-5000㎡
ISWARD一代机型有两款型号P30和P50,对应的日剪草面积可达3000-5000㎡。充电2小时可连续工作6小时,真正的实现了用智能代替人工,提高工作效率。
 电话:15757380890
电话:15757380890